LangGraph智能体框架介绍
Quick start: https://langchain-ai.github.io/langgraph/tutorials/introduction/
什么是智能体? 当我们谈论系统是"智能体"时,我们指的是使用大型语言模型(LLM)来决定控制流的系统。LLM 可以在不同层次上决定控制流,例如LLM在两个流程之间进行路由、LLM决定调用哪个工具、LLM决定是否输出最终答案等。
前言
什么是智能体?
还有其他一些通常与智能体相关的概念
- 工具调用:这通常是 LLM 做出决策的方式
- 行动执行:通常情况下,LLM 的输出被用作行动的输入
- 记忆:可靠的系统需要了解发生的事情
- 规划:规划步骤(无论是显式还是隐式)帮助 LLM 以最高质量完成任务
什么是 langgraph ?
LangGraph 是一个库,用于构建有状态的多参与者应用程序,利用大型语言模型(LLM)来创建智能体和多智能体工作流。与其他 LLM 框架相比,它具有以下核心优势:循环、可控性和持久性。
LangGraph 允许定义包含循环的流程,这对于大多数智能体架构至关重要,使其区别于基于有向无环图(DAG)的解决方案。作为一个非常底层的框架,它提供了对应用程序流程和状态的细粒度控制,这对于创建可靠的智能体至关重要。此外,LangGraph 内置持久性,支持高级的人类在环和记忆功能。
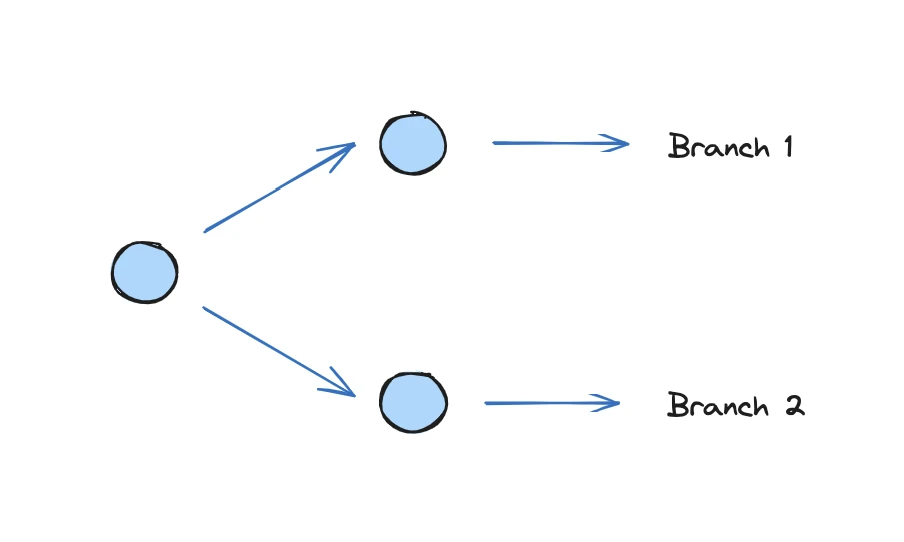
- 循环和分支: 在应用程序中实现循环和条件语句。
- 持久性: 在图的每一步自动保存状态,支持在任何点暂停和恢复图的执行,以实现错误恢复、人类介入工作流、状态回溯等功能。
- 人机协作: 人可以中断图的执行,并且批准或编辑智能体的所有动作计划。
- 流式支持: 在每个节点生成输出时进行流式传输,包括令牌流式传输。
- 与 LangChain 的集成: LangGraph 可以无缝集成 LangChain 和 LangSmith
LangGraph核心概念:
高度可控: 跟LangChain相比,LangGraph 是一个非常底层的系统,这赋予了用户对所构建系统的高度控制能力。目前让智能体系统可靠地工作是一个挑战,用户对系统控制得越多,任务完成的效果就更好。
人机协作: LangGraph 内置了一个持久层,这使得人机协作的交互模式成为可能。我们相信,"人类-智能体交互"模式将成为新的"人机交互",因此我们在设计 LangGraph 时内置了持久性以支持这一点。
流式优先: LangGraph 对流式处理提供了一流的支持。智能体应用程序通常需要较长时间运行,因此向同步进度非常重要,而流式处理是实现这一点的绝佳方式。LangGraph 支持事件(如工具调用)和 LLM 响应的流式传输。
设计模式
结构化输出
在构建智能体时,通常希望节点内的LLM(大语言模型)返回结构化输出。因为结构化输出可以用于图的路由下一步(例如,在两个不同的状态之间流转)或更新状态的特定字段。由于LangGraph节点可以是任意的Python函数,因此你可以随意实现这一点。
工具调用
在智能体中,工具调用是普遍使用的。工具调用指的是从多个可用工具中选择,并指定要调用哪些工具以及输入应该是什么。由于LangGraph节点可以是任意的Python函数,因此你可以随意实现这一点。
记忆
记忆是智能体应用中的一个关键概念。记忆很重要,因为终端用户通常期望应用程序能够上下文。LangGraph非常适合让你完全控制应用程序的记忆。通过用户定义的State,你可以指定要保留的记忆的方式。通过检查点,你可以存储之前交互的时间点,并在后续交互中从那里恢复
人类在环
智能体系统通常需要一些人类在环(或"在环")的交互模式。这是因为智能体系统仍然不太可靠,因此在任何敏感任务/操作中都需要有人类参与。由于检查点的存在,这些在LangGraph中都很容易实现。检查点之所以必要,是因为许多这些交互模式涉及运行图直到某个点,等待某种人类反馈,然后继续。当你想要"继续"时,你需要访问图在中断之前的状态,而检查点是一个内置的、非常方便的方式来实现这一点。
我们看到一些常见的人类在环交互模式正在出现: 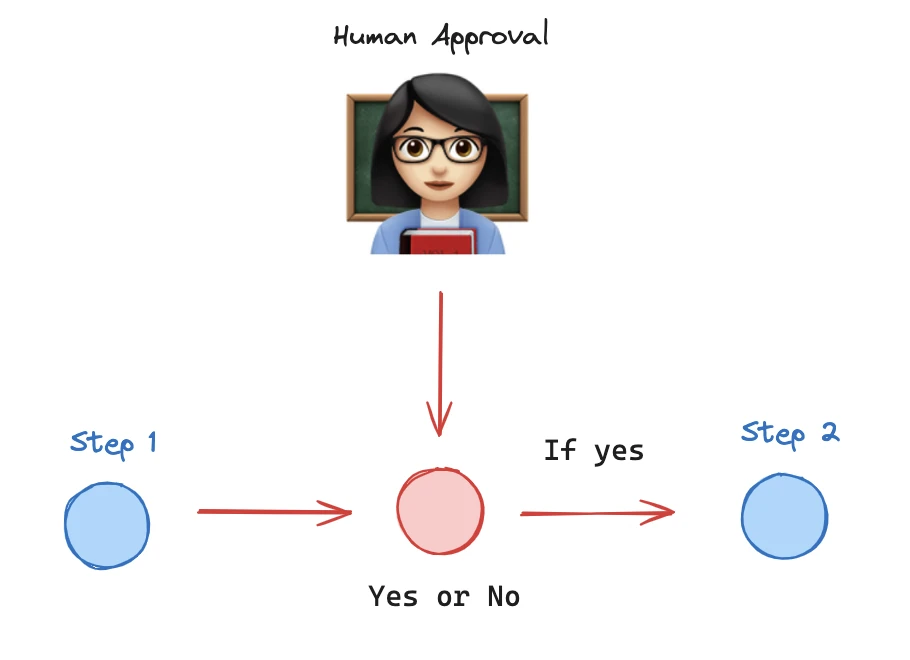
审批
一个基本的模式是让智能体在执行某些工具之前等待审批。这可能是所有工具,或者只是某些工具的子集。对于更敏感的操作(如写入数据库),通常建议这样做。这可以通过在特定节点之前设置断点来轻松实现。请参阅本指南,了解如何在LangGraph中实现这一点。
等待输入
类似的模式是让智能体等待人类输入。这可以通过以下步骤实现:
- 创建一个专门用于人类输入的节点
- 在节点之前添加断点
- 获取用户输入
- 使用该用户输入更新状态,作为该节点
- 恢复执行
编辑智能体操作
这是一个更高级的交互模式。在这种交互模式中,人类实际上可以编辑智能体之前的一些决策。这可以在流程中(在断点之后,作为审批流程的一部分)或事后(作为时间旅行的一部分)进行
时间旅行
这是一个相当高级的交互模式。在这种交互模式中,人类可以回顾之前检查点的列表,找到他们喜欢的一个,选择性地编辑它,然后从那里恢复执行。状态回溯
Map-Reduce (MapReduceExample.ipynb)
在智能体中,一个常见的模式是生成一个对象列表,对每个对象进行一些处理,然后合并结果。这非常类似于常见的map-reduce操作。这可能会有一些棘手的地方。首先,提前定义一个结构化图可能很难,因为对象列表的长度可能是未知的。其次,为了进行这种map-reduce,你需要存在多个版本的状态……但图共享一个共同的状态,那么该如何实现呢?LangGraph通过Send API支持这一点。这可以用于允许条件边缘向多个节点发送多个不同的状态。它发送的状态可以与核心图的状态不同。 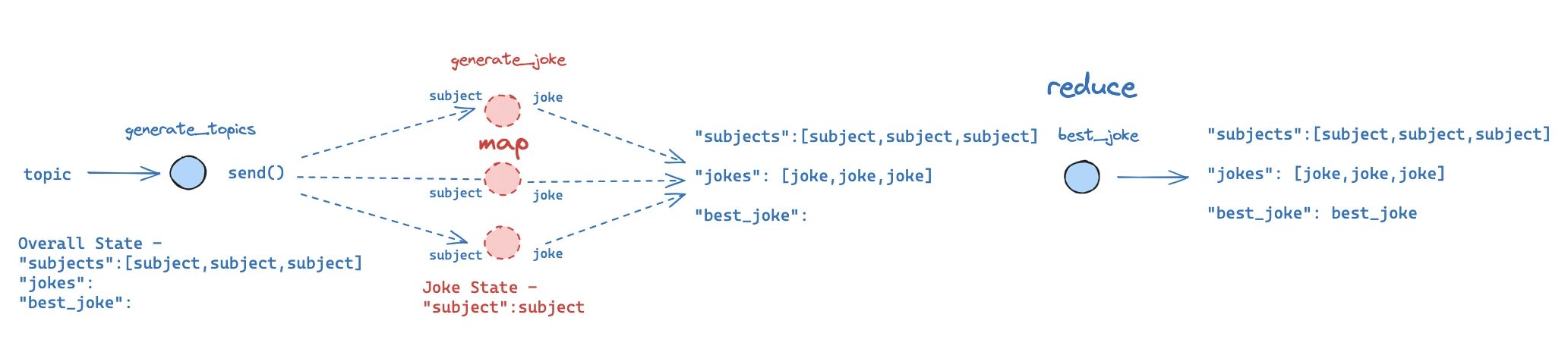
多智能体 (MultiAgent.ipynb)
你可能听说过"多智能体"架构。这到底是什么意思?当大多数人谈论多智能体架构时,他们通常指的是一个系统,其中有多个不同的基于LLM的系统。这些基于LLM的系统可以简单到只是一个提示和一个LLM调用,或者复杂到像ReAct智能体一样。多智能体系统中的大问题是它们如何通信。这涉及到它们通信的模式以及它们通信的顺序。 LangGraph非常适合编排这些类型的系统。它允许你定义多个智能体(每个智能体是一个节点),一个任意状态(以封装它们通信的模式),以及边缘(以控制它们通信的顺序)。 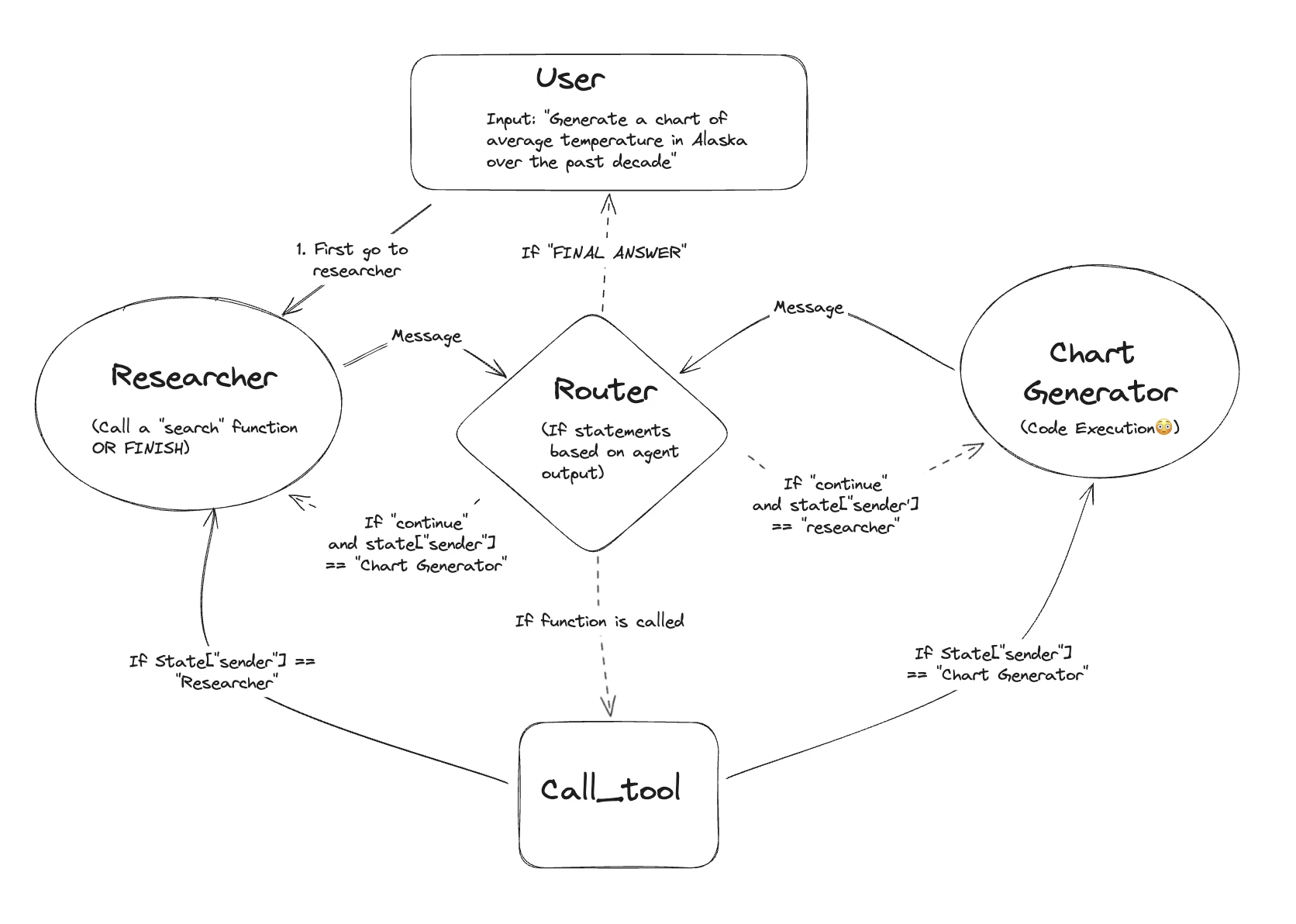
规划
智能体系统面临的一个大问题是长期规划。克服这一问题的一个常见技术是有一个明确的规划步骤。这通常涉及调用LLM来提出一系列要执行的步骤。从那里,系统尝试执行这一系列任务(这可以使用子智能体来完成)。可选地,你可以在每一步之后重新审视计划,并在需要时更新它。 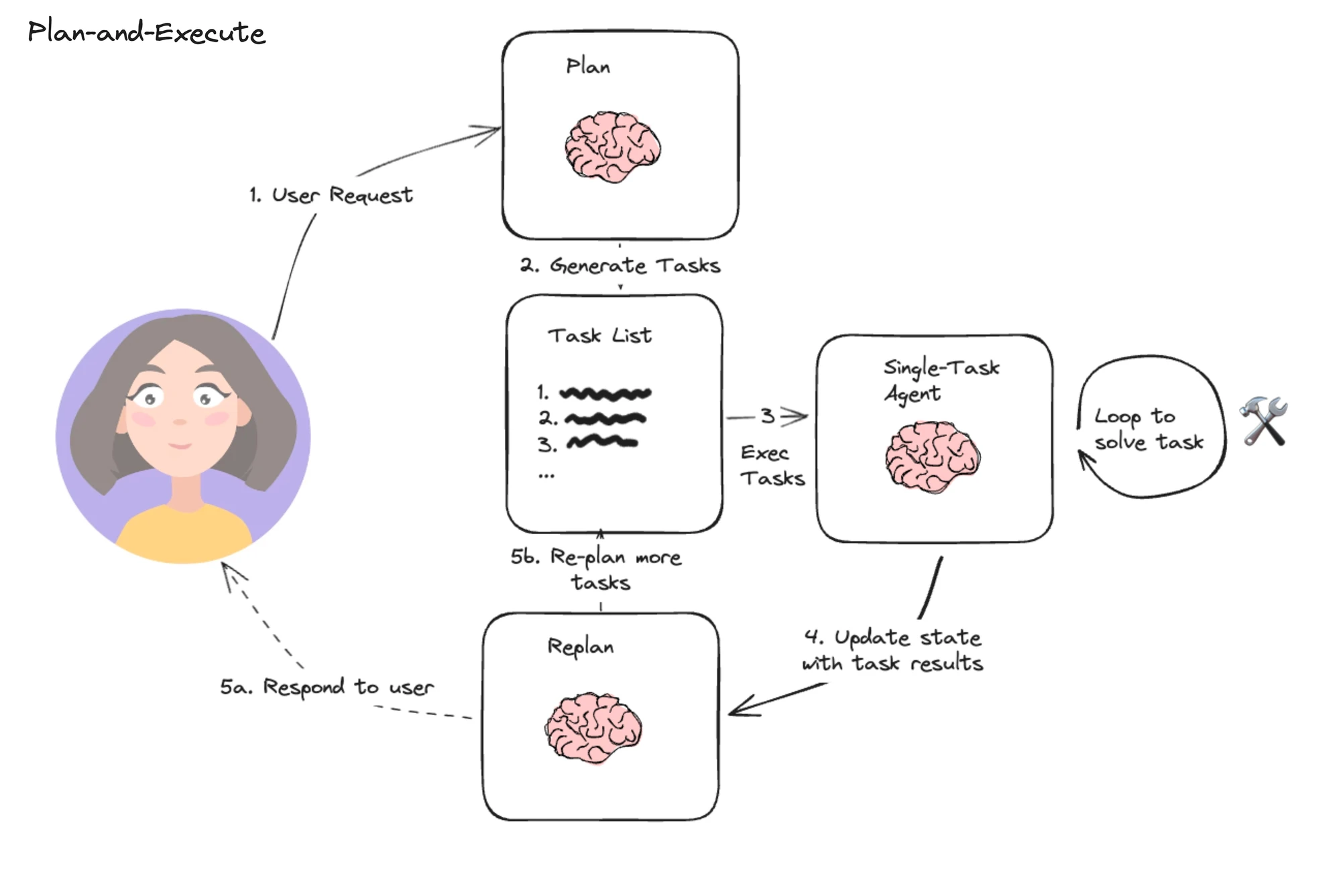
反思
智能体通常难以产生可靠的结果。因此,检查智能体是否正确完成任务是有帮助的。如果完成了——那么你可以结束。如果没有——那么你可以将为什么不正确的反馈传递回智能体的另一个迭代中。这个"反思"步骤通常使用LLM,但不是必须的。例如直接执行 llm 生成的代码,并且把执行结果反馈给 llm,这个也是一种反思。 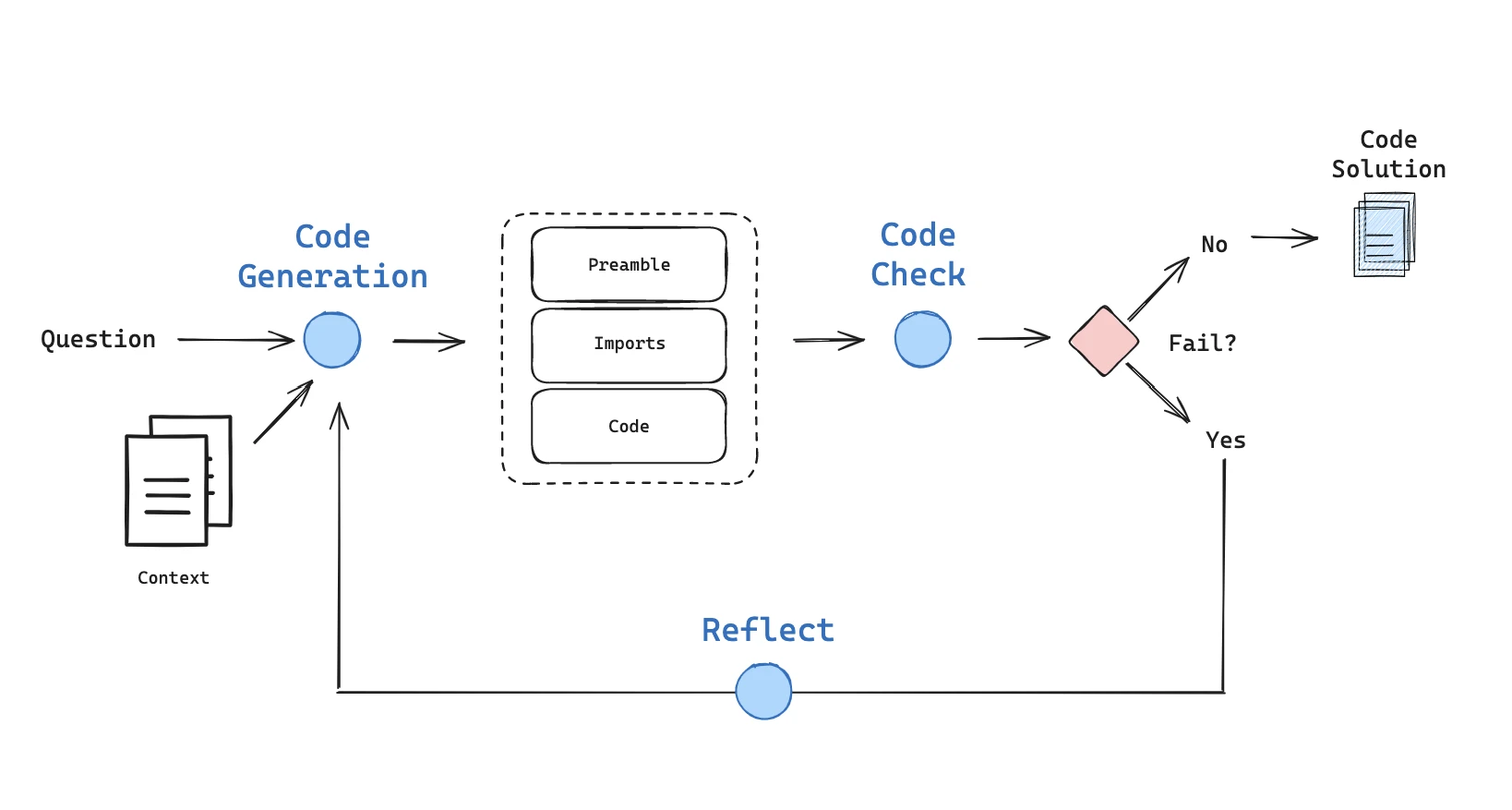
ReAct智能体
最常见的智能体架构之一是通常称为ReAct智能体架构的架构。在这种架构中,LLM在一个while循环中被反复调用。在每一步,智能体决定调用哪些工具,以及这些工具的输入应该是什么。然后执行这些工具,并将输出作为观察结果反馈给LLM。当智能体决定不再值得调用更多工具时,while循环终止。这是我们在LangGraph中预构建的少数高级智能体之一——你可以使用create_react_agent来使用它。
- 使用工具调用让LLM调用工具
- 我们使用消息来提示LLM
- 允许使用需要多个输入的工具。
- 允许一次调用多个工具。
- 要求LLM在决定调用哪些工具之前显式生成一个"思考"步骤。这是"ReAct"中的"推理"部分。我们的实现默认不这样做,主要是因为LLM已经变得更好,这不再那么必要。当然,如果你希望提示它这样做,你完全可以。